Project Evaluation
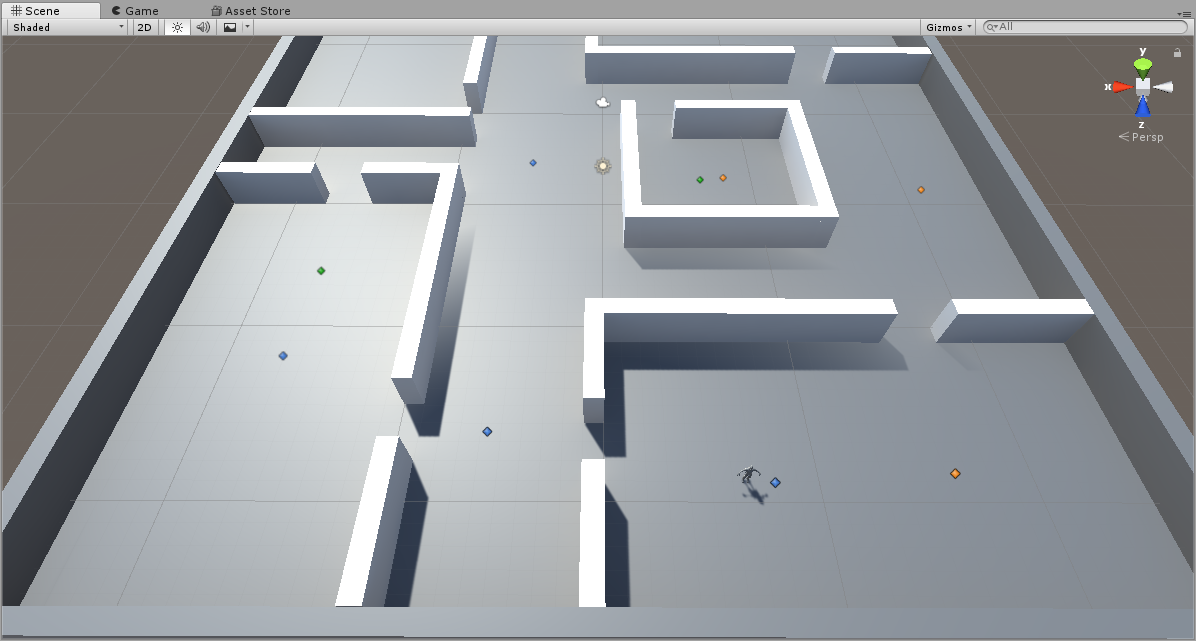
The goal of my project was to investigate the use of behaviour trees (BT) in a stealth based environment. I do believe that I have achieved this by researching into various different aspects of artificial intelligence (AI) used within games, the various AI used by different games, especially the BTs used within Alien: Isolation and Halo 2. At the end of my deadline I have implemented a BT that my agents use in a stealth based environment where the player will need to get from the start location to the objective. If the player is spotted the AI will converge on their location, once close enough the AI will kill the player forcing them to try again from the start location. I believe that the project has been a success and I have made good progress despite having various personal issues that restricted my availability to work on the project, as well as having commitments to other modules. I was able to complete all my milestones and create a few extra simple beh...